Суть та філософія напряму
Напрям орієнтований на розв’язання складних задач керування широким класом лінійних та нелінійних дискретних, неперервних і неперервно-дискретних (гібридних) динамічних систем (ДС).
Під невизначеністю тут розуміється неоднозначність інформації про вектор стану і параметри об’єкта, а також наявність неконтрольованих завад вимірювання та зовнішніх збурень. Розвиток високих технологій довів, що традиційні імовірнісні (стохастичні) моделі вимагають надто великого обсягу апріорних даних і є критично чутливими до найменших відхилень, що часто призводить до розбіжності відомих алгоритмів.
Філософія гарантованого підходу полягає у відмові від імовірнісних гіпотез. Властивості невизначених величин більш природно задаються лише гарантованими інтервалами або компактними множинами їхніх можливих значень (як це прийнято в машинобудуванні та вимірювальній техніці).
Наукова школа та світовий контекст
Фундамент цього підходу закладено у класичних працях М. М. Красовського та F. C. Schweppe. Вагомий внесок у розвиток методів гарантованого оцінювання та робастного керування зробили О. Б. Куржанський, Ф. Л. Черноусько, Б. М. Пшеничний, M. Milanese, J. P. Norton, а також академік НАН України В. М. Кунцевич (1929–2022).
В даний час в світовому науковому просторі найбільш розробленою, звичайно, є лише теорія подібної стійкості для лінійних (неперервних і дискретних) систем. У цій області вже отримані серйозні результати. Більш важливою і важкою фундаментальною задачею є розробка відповідної теорії для певних класів нелінійних систем, так само як і побудови їхніх множин досяжності і граничних множин.
Сьогодні співробітники Відділу 21 «Керування динамічними системами» є активними учасниками та продовжувачами цієї видатної наукової школи, розвиваючи її методи у фундаментальних темах НАН України, починаючи з 2007 року і дотепер. Сучасні розробки колективу під керівництвом члена-кореспондента НАН України В. Ф. Губарєва складають теоретичні основи новітнього наукового напряму в керуванні й ідентифікації систем.
Фундаментальні наукові завдання та концепції напряму
Керування сімействами (класами) об’єктів: оскільки конструкторові системи керування завжди доступні лише приблизні оцінки, задача трактується як керування не одним фіксованим об’єктом, а цілим сімейством (класом) об’єктів для забезпечення їхньої робастної стійкості.
Побудова множин досяжності ДС – множин (трубок траєкторій), у які потрапляють вектори станів системи у довільний поточний час при всіх можливих початкових умовах, керуваннях та збуреннях із заданих областей.
Побудова граничних множин дисипативних ДС – множин в які попадають та залишаються в них всі її фазові траєкторії при довільних початкових умовах, або початкових умовах з деякої обмеженої області фазового простору (для ДС, дисипативних в області). Розміри цих граничних множин визначають точність керування ДС у сталому режимі.
Перехід до нелінійних моделей: пріоритетним фундаментальним завданням є розробка методів побудови множин досяжності та оцінювання стану для складних класів нелінійних систем.
Математичний апарат та авторські методи
Для побудови точних множинних оцінок векторів стану та параметрів у фазових просторах використовуються геометричні об’єкти різної природи. Методологічний інструментарій відділу включає:
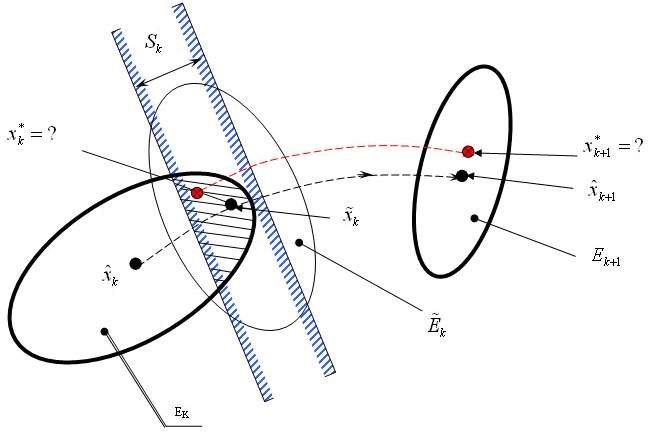
Робастне еліпсоїдальне оцінювання: у рамках цього підходу в Інституті космічних досліджень НАН України і ДКА України вперше розроблені методи гарантованого еліпсоїдального оцінювання стану і параметрів ДС, що мають властивість робастності (нечутливості) до відмінності апріорних оцінок властивостей невизначеності, що використовуються в цих алгоритмах, від їхніх дійсних властивостей.
Ефективне задання багатогранників: авторами запропонований спосіб опису багатогранників за допомогою систем нерівностей. Він мінімізує обчислювальні затрати та дозволяє в процесі роботи алгоритму конструктивно виявляти помилки в припущеннях про апріорні властивості невизначеності та відбракувати вимірювання з помилками.
Методи регуляризації зі штрафними функціями: розвиваються та застосовуються класичні й сучасні алгоритми, що забезпечують коректність розв’язання обернених задач оцінювання стану та параметрів динамічних систем в умовах невизначеності.
Прямий метод Ляпунова: розвивається та використовується для дослідження властивостей робастної стійкості й дисипативності динамічних систем, а також синтезу керування ними в умовах невизначеності.
Найважливіші отримані результати
В рамках досліджень співробітниками відділу отримано такі фундаментальні результати:
- Робастні методи оцінювання стану та параметрів лінійних і нелінійних дискретних, неперервних і дискретно-неперервних ДС в умовах невизначеності з використанням геометричного апарату еліпсоїдів і багатогранників.
- Методи дослідження робастної стійкості лінійних і нелінійних нестаціонарних дискретних ДС.
- Методи побудови множин досяжності й інваріантних множин нестаціонарних лінійних і певних класів нелінійних ДС.
- Методи синтезу керування нелінійними нестаціонарними дискретними ДС із умов робастної стійкості та дисипативності.
Практичне значення та апробація
Ефективність розробленого гарантованого підходу підтверджена практикою створення систем керування технологічними процесами та результатами обробки даних реальних космічних експериментів.
Визначним практичним впровадженням напряму є розробка алгоритмів навігації й керування орієнтацією першого єгипетського супутника дистанційного зондування EgyptSat-1 (запущеного у 2007 році), створеного підприємствами України.
Результати фундаментальних та прикладних робіт за цим напрямом системно опубліковані у провідних вітчизняних і міжнародних наукових журналах та виголошені на авторитетних тематичних симпозіумах і конференціях.