В рамках даного наукового напряму розглядаються проблеми керування широким класом лінійних та нелінійних дискретних, неперервних і неперервно-дискретних динамічних систем (ДС) в умовах невизначеності. Під невизначеністю ДС розуміються неоднозначності в доступній інформації про вектор стану і параметри, а також неконтрольованих завад вимірювання і зовнішніх збурень.
В даний час для рішення задач керування ДС в умовах невизначеності широке поширення одержали методи, засновані на імовірнісній інтерпретації її властивостей. Однак ці методи вимагають для своєї реалізації великого обсягу апріорної інформації про імовірнісні властивості невизначеності, яка часто відома розробникам систем керування лише приблизно. Крім того, вони критично чутливі до відмінності істинних властивостей невизначеності від їх апріорно передбачуваних властивостей. Необхідність вирішення складних задач керування, що диктується розвитком високих технологій, привела у багатьох випадках до відмови від розповсюджених імовірнісних моделей невизначеності і до використання її теоретико-множинних моделей. У сучасній теорії керування інтенсивно розвивається підхід до створення методів керування й оцінювання, заснований на теоретико-множинних моделях невизначеності, який отримав назву гарантованого підходу. При цьому властивості невизначених величин більш природно задаються лише гарантованими інтервалами (як це широко розповсюджено в машинобудуванні та вимірювальній техніці) або компактними множинами своїх можливих значень. Як множинні оцінки використовуються опуклі багатогранники або багатомірні еліпсоїди у відповідних просторах.
Основи даного підходу були закладені в роботах М.М. Красовського і F.C. Shweppe. Вагомий внесок у розвиток методів гарантованого оцінювання внесли О.Б. Куржанський, Ф.Л., Черноусько, В.М. Кунцевич, Б.М. Пшеничний, M. Milanese, J.P. Norton, а також інші, включаючи й співробітників відділу 21 «Керування динамічними системами».
Відмова від гіпотези про стохастичну природу неконтрольованих збурень, завад і використання лише деяких їх апріорних множинних оцінок привела до зародження і швидкого розвитку нового напрямку в теорії ідентифікації динамічних систем і оцінці їхніх векторів стану – розробки методів гарантованого оцінювання.
Основними тут стали роботи академіків М.М. Красовського й О.Б. Куржанського, продовжені академіками Ф.Л. Черноусько, В.М. Кунцевичем і Б.М.Пшеничним. Наприкінці ХХ-го століття прийшло розуміння тієї надзвичайно важливої обставини, що так як конструкторові системи керування доступні лише деякі оцінки параметрів об’єкта, то перед ним, по суті, стоїть задача керування не одним фіксованим об’єктом, а цілим сімейством (класом) об’єктів. І в цьому випадку необхідний такий вибір керування, що забезпечує стійкість усього сімейства (класу) таких систем, тобто необхідно домогтися робастной стійкості.
В даний час найбільш розробленою, звичайно, є лише теорія подібної стійкості для лінійних (неперервних і дискретних) систем. У цій області вже отримані серйозні результати. Більш важливою і важкою фундаментальною задачею є розробка відповідної теорії для певних класів нелінійних систем, так само як і побудови їхніх множин досяжності і граничних множин.
Під множинами досяжності ДС розуміються множини, в які попадають в довільний поточний час її вектори станів при всіх початкових умовах, векторах керування та зовнішніх збуреннях, що належать певним заданим множинам (трубки траєкторій). Під граничною множиною дисипативної ДС розуміються множини, в які попадають та залишаються в них всі її фазові траєкторії при довільних початкових умовах, або початкових умовах з деякої обмеженої області фазового простору (для ДС, дисипативних в області). Розміри граничної множини визначають точність керування ДС в сталому режими.
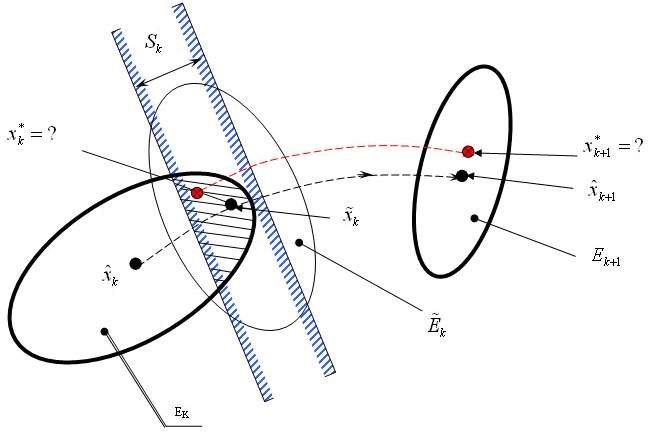
У рамках цього підходу в Інституті космічних досліджень НАН України і НКА України вперше розроблені методи гарантованого еліпсоїдального оцінювання стану і параметрів ДС, що мають властивість робастності (нечутливості) до відмінності апріорних оцінок властивостей невизначеності, що використовуються в цих алгоритмах, від їхніх дійсних властивостей.
Саме завдяки цій властивості робастні методи гарантованого оцінювання зберігають свою працездатність у багатьох випадках, коли відомі методи стають розбіжними. Теоретичні дослідження, практика розробки систем керування технологічними процесами й орієнтацією КА і результати обробки даних космічних експериментів підтвердили ефективність гарантованого підходу до рішення задач керування й оцінювання в умовах невизначеності і перспективність його застосування в задачах керування КА. На основі вищезгаданих робастних методів були створені алгоритми навігації й керування орієнтацією мікросупутника EgyptSat-1, розробленого підприємствами України за замовленням уряду Єгипту.
Виконується та планується подальший розвиток методів оцінювання стану нелінійних ДС на основі багатогранників. При цьому буде використовуватися запропонований раніше його авторами – співробітниками відділу спосіб задавання багатогранника за допомогою систем нерівностей, що потребує менших обчислювальних затрат. Крім того, цей спосіб дозволяє в процесі роботи алгоритму конструктивно виявляти помилки в припущеннях про апріорні властивості невизначеності та відбракувати вимірювання з помилками.
Для вирішення задач оцінювання стану та параметрів ДС передбачається також використовувати розвивати способи, засновані на методах регуляризації А.М. Тихонова. Для дослідження властивостей робастної стійкості і дисипативності динамічних систем, а також синтезу керування ними в умовах невизначеності передбачається використання і розвиток запропонованих раніше авторами проекту способів, заснованих на ідеях прямого методу Ляпунова.
Дослідження в рамках даного наукового напряму виконувалися та виконуються згідно фундаментальних тем НАН України, починаючи з 2007 року по цей час. Результати робіт, які отримані в попередніх проектах, і сучасні розробки під керівництвом члена-кореспондента НАН України В.Ф. Губарева складуть теоретичні основи нового наукового напрямку в керуванні й ідентифікації систем, на базі якого можливе розв’язування важливого класу прикладних задач.
Серед отриманих результатів до найважливішим можна віднести такі:
- робастні методи оцінювання стану, параметрів лінійних і нелінійних дискретних, неперервних і дискретно-неперервних ДС в умовах невизначеності з використанням еліпсоїдів і багатогранників;
- методи дослідження робастної стійкості лінійних і нелінійних нестаціонарних дискретних ДС;
- методи побудови множин досяжності й інваріантних множин нестаціонарних лінійних і деяких класів нелінійних ДС;
- методи синтезу керування нелінійними нестаціонарними дискретними ДС із умови робастної стійкості й дисипативності.
Отримані результати за цим напрямом опубліковані в наукових і науково-технічних журналах і виголошені на тематичних симпозіумах, конференціях.